Hi, I am planning missions for an upcoming trip in the Litchi mission hub using Google Earth. One of the missions will be launched from a rooftop. To my understanding, the first point in GE is used as a reference point for the flight altitude. So here comes the problem. Google earth will set the mission start level to the ground level, despite the structure built on the ground. The drone will be launched from a rooftop, about 20-30 meters above the ground (I cannot establish the exact height, there is no data available). Because of that, I believe the drone will adjust its altitude in relation to the physical mission start point. If this is the case, do I have to go through all waypoints of the mission before the start and adjust the waypoints’ altitude once the height of the rooftop is known, or are there maybe tricks I could use to avoid it? Has anybody encountered such a problem? I prefer to avoid ground-level altitude settings, the terrain around the filmed object is uneven, with sudden drops.
Thank you!

Make shure the first waypoint in the mission is also above the rooftop.
The Above groundlevel calculation then will be within the accuracy of the elevation data used by google earth.
You will have to adjust the height of the waypoints.
Explain why and how.
Comments like this are useless.
Adjust the height when you are on your roof. Otherwise, your flight will fail.
Again… Explain why and how.
Why adjust the height?
What height?
Adjust to what?
Why will the flight fail?
I don’t think he wants to use AGL though…
So couldn’t he just deduct the 20-30 meters from the following waypoints as he makes the plan? Unless he wants to have a very specific altitude that cannot tolerate a (potential) 5 meter error?
Roof top = (say it’s) 25 meters, I want to be 80 meters from the ground during flight. I put 55 meters into my flight plan?
I am not sure, just trying to understand for myself in the future. . . I’m learning everyday!
I believe, what TriBar meant, is, when you start from a level say “30 meters off the ground zero”, you just have to set the first waypoint at the position from the starting point. Then the drone measures the exactly height and calculates all the height of all other waypoints to (starting height = 0m + (increased height 20 m + fixed added 30m) = exact waypoint height = 0m + 20m +30m = 50m.
So to all your waypoints a value of “30m” will be automatically added.
Hope, I did not make an error in my explanation.
Happy flying
Hans
That’s what I am doing, but GE does not put the yellow pin on the roof. It looks like the pin is on ground level (The label in another view is on the ground level)… I woukd love to test, but I have literarly no access to any roofs in the nieghborhood 
And I am bit afraid of using ground level data. Somehow I think elevation related to start point is safer…
I probably will do it in the end. I Was wondering if someone actually launched a drone from the rooftop fopr a mission planned with GE, and what type of results were achieved.
It is more about max altitude. I can fly (legally) no higher than 50 m in this category, and the drone, according to GE has to be at an altitude of about 48 m to make the recordings I desire…
I am not sure how to do it. If I plan a mission using GE, load it in the mission hub, then raise the altitude of the 1st waypoint, the remaining waypoints remain at the original level. But does it mean that Litchi will calculate altitude correctly? If yes, the problem is solved, but did someone actually do it?
I do not know if I did it 100% correctly or not. I made a short plan. Knowing the launch would be off a 40’ tall silo.
I made first WP 20’ AGL (Checked the box) (Also in the plan settings "Use online elevation is not checked.) then 30’, then 40’ I did not check “GL” on these. On the 5th I put 50’ and checked it AGL. I did this because the WP was above the barn roof, approximately 35’ high. I wanted to see if it recognized the barn and compensated. (by going to 85’ or so.) I launched. The drone immediately went to WP1 and went down 20 feet to an altitude of 20’. Then up to 30, then up to 40 and 50. So it effectively ignored the take off location. Was going to try another run, but weather turned and got to windy.
If there is some other way to test let me know and I will try depending on the weather.
All this probably goes back to what was said. If you use Google Earth to set WP1, the rest will follow from there. I’ve always felt that it was based on the home point that is established on take off, and maybe it is if I had not checked WP1 as AGL. Which I may try if I have time.
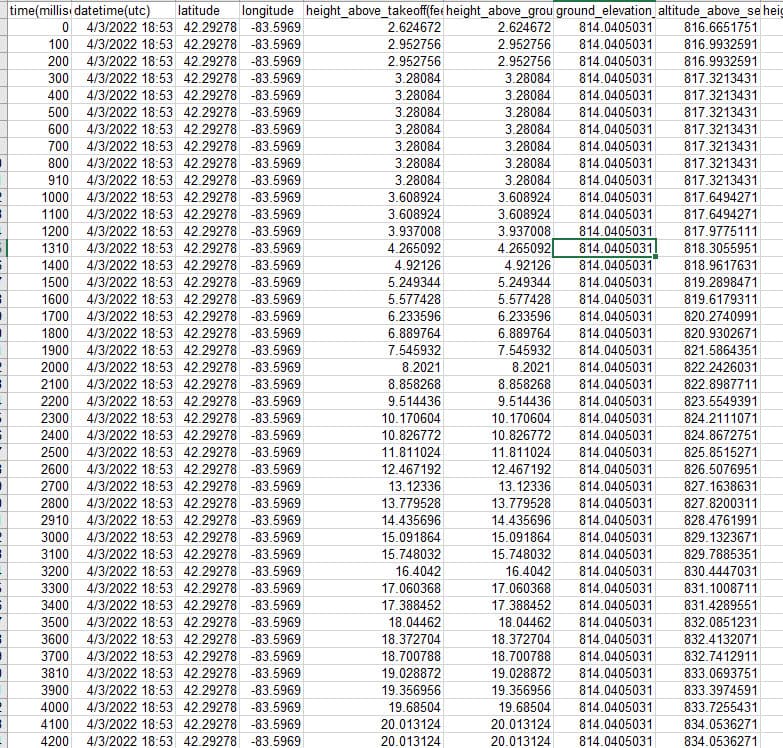
Download the flight log in CSV format from UAV airdata (assuming you save your logs there and check the various height figures that it contains for each point in the flight by opening it in excel
This is the first bit, or I can share file if you tell me how.
So I launched from the top of the silo, but you can see it shows 2.6 ft above ground.
The drone will adjust its altitude from its takeoff point.
Actually, have you used Google Earth to plan the mission, or it is a mission plan created stictly in a mission hub?
That’s what I meant. Sry,I’m justa casual drone user 