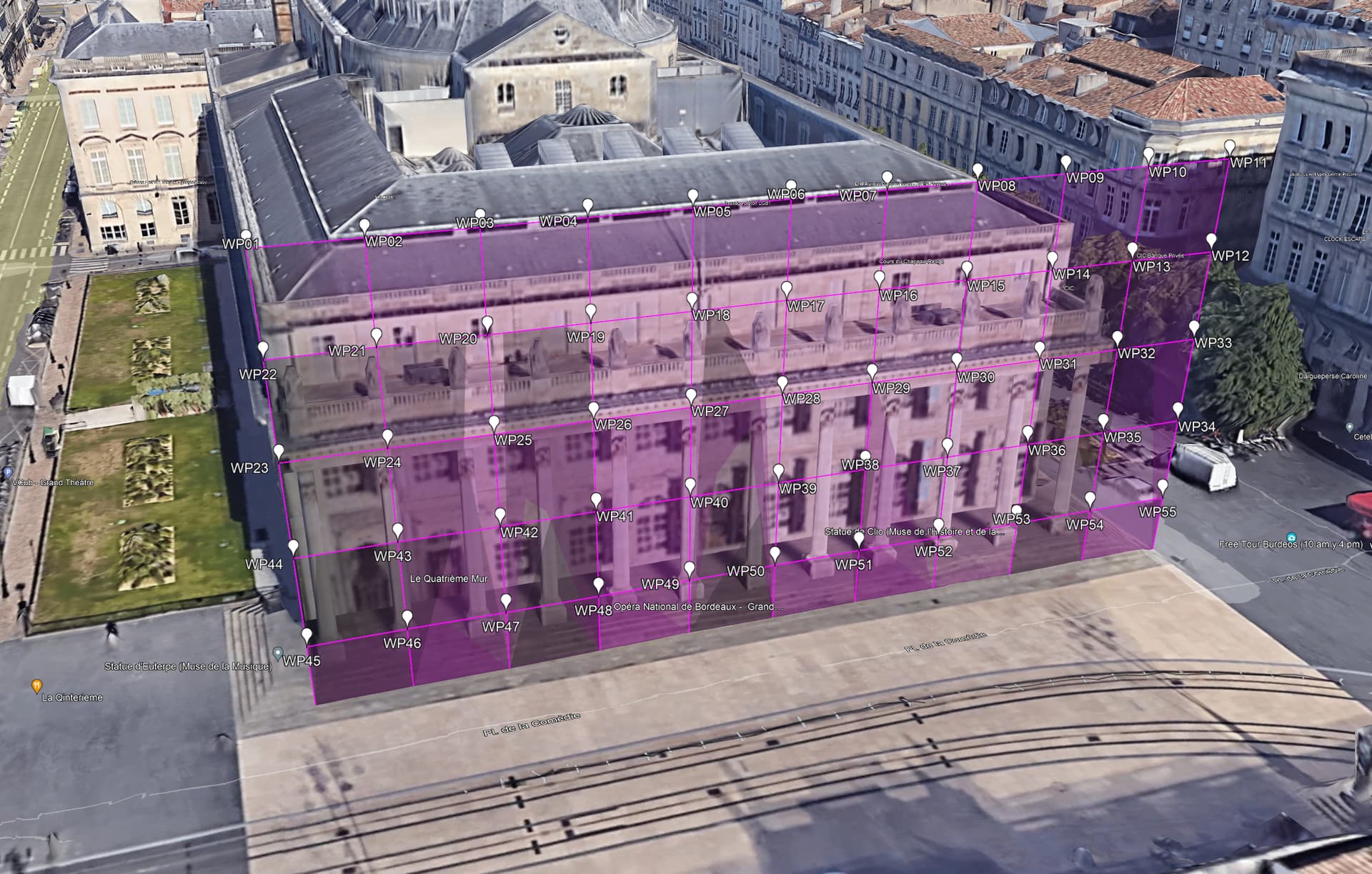
I have created a new utility to create a vertical waypoint mission that can be used to capture the facade of a building. The input to this utility is a simple line drawn in Google Earth Pro. The details such as height and photo spacing are entered directly into the web application.
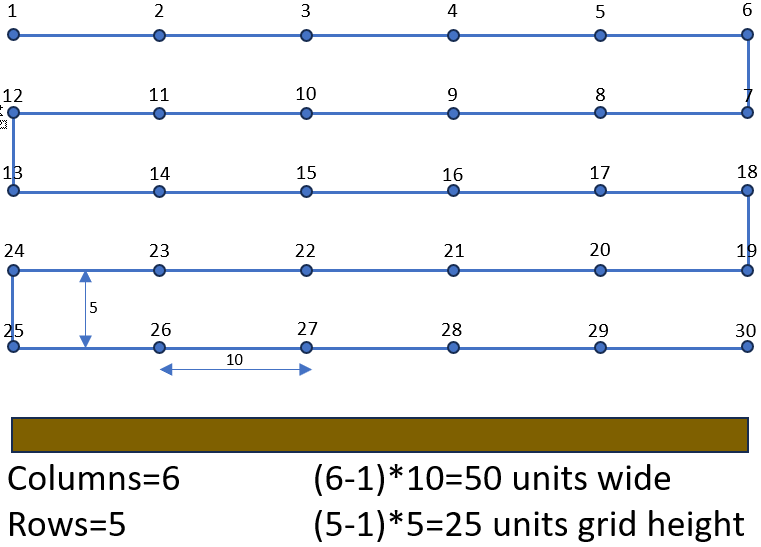
The waypoint path begins at the top (maximum height) and traverses down the structure as shown in the example below.
Hello, used your Facade Quest Creator utility for Litchi. Very interesting and works perfectly. I wonder why with mission hub I can’t see all the waypoints even if I can select them and why there isn’t a stop when taking photos. Thank you.
The waypoints are on top of each other. So, you only see the uppermost waypoints. If you preview your mission in Google Earth, you will be able to see all of the waypoints when the view is rotated.
I worked with another person to test this. In our testing, we found that adding a “Wait” was unnecessary. It would still take the requested photos at the correct angles. The only waypoint where I find it is necessary to include a “Wait” is the first waypoint.
If you have found a case where it doesn’t properly take the photo without a “Wait”, please let me know what drone you are using and any other details so that I can test it.
Good morning,
thanks for his reply.
The mission was carried out correctly.
I was curious how the drone could take photos at the exact spot without pausing.
I’m surprised by this possibility.
For the mission I used the DJI Mni 2 drone.
I will also try its other utilities which I find very useful and interesting.
Thanks again, have a nice day
When the “Path Mode” is set to “Straight Lines”, the drone will always pause for a moment at each waypoint. That momentary pause is enough for it to take a photo. If you identify a situation where that does not work, please let me know.
You are right about the facade Mission Maker. It very closely provides the finctionality that I am looking for.
How hard would it be to support multi point lines (Polylines) ? I feel that I can manipulate the .csv files afterwards to add the camera angles I require.
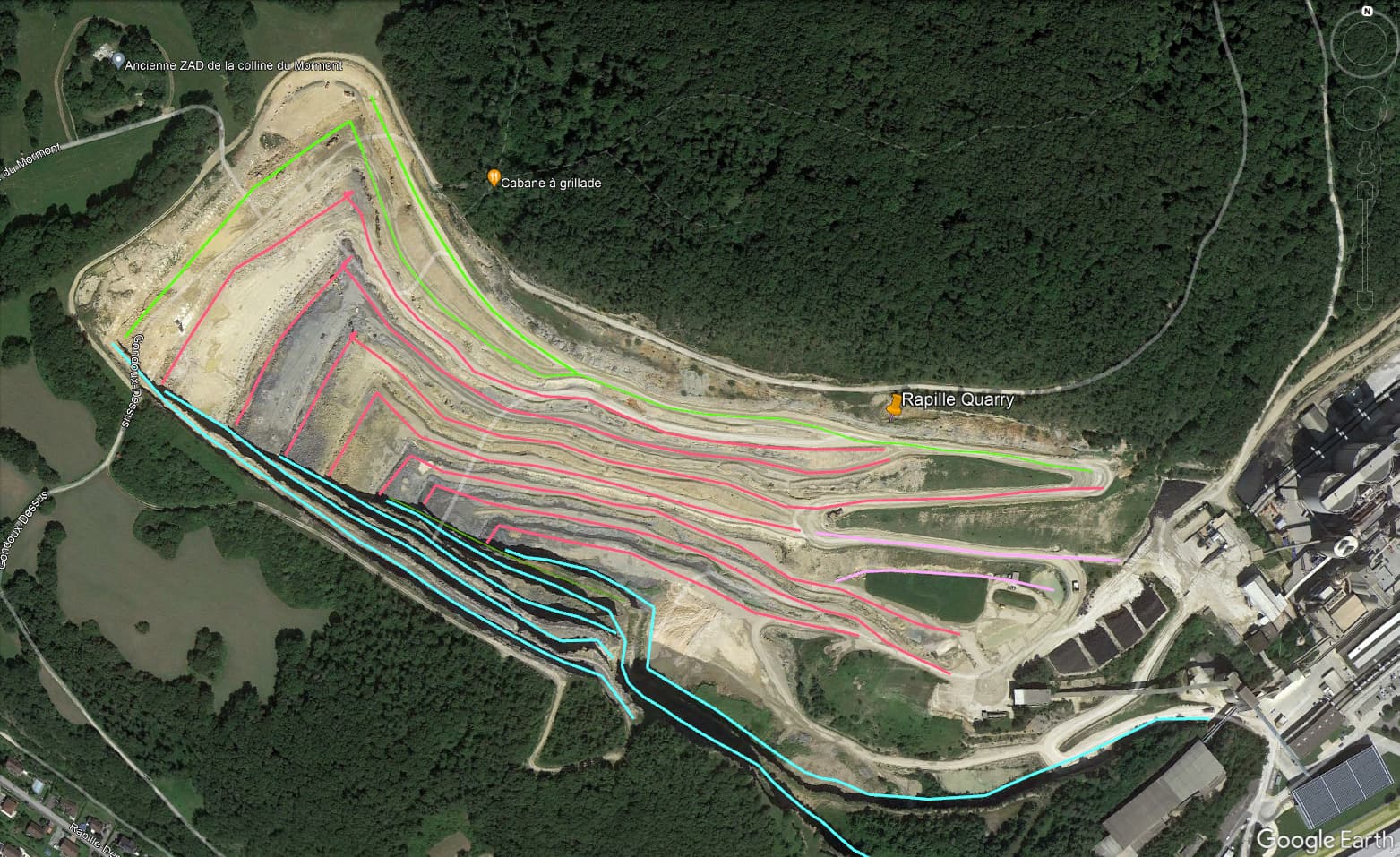
Here is a screenshot from a polyline drawn in Google Earth. The concept of left 90 degrees works well as a constraint for the camera facing direction.
I attached a link the .kml file for the lines as well in case you are interested in having a look. (Not able to upload the kml file directly.) Let me know if the link does not work.
Hi Wes,
Another possible use for the multipoint facade mission. If the user set the flight to a single row of photos or video, it could be helpful to video or photograph a shoreline property. Is this possible with just a regular Litchi Mission without POIs? Is it as simple math to add 90 degrees to the flight azimuth? This could possibly be done in excel as a work around. (just a random thought…)
Cheers,
Jeff
This is well beyond the scope of my “Facade Mission Maker”.
Are you wanting to create a single level/altitude of photos? If so, this is easily done in Litchi’s Mission Hub without the need for any additional tools. If you want to create a multi-level mission from a multi-line path, my only suggestion is to define the path as you have in Google Earth or Litchi, then use Excel to copy, paste, and reverse every other level to create the final mission. I know that is a bit of work, but I don’t have any automated way to accomplish what you want.
I just took one of the multi-line paths in the KML file you provided and ran some tests. These are the steps I took:
Export a single path from Google EarthPro as a KML file.
Import this KML file into Litchi’s Mission Hub.
Change all of the waypoint heights to be “Above Ground”.
Export the data as a CSV file.
Open the CSV file in Excel and duplicated the group of rows several times and reversing the rows ever other group. I also changed the above-ground height in every group.
I imported the result back into Litchi.
I exported the mission to Google Earth Pro.
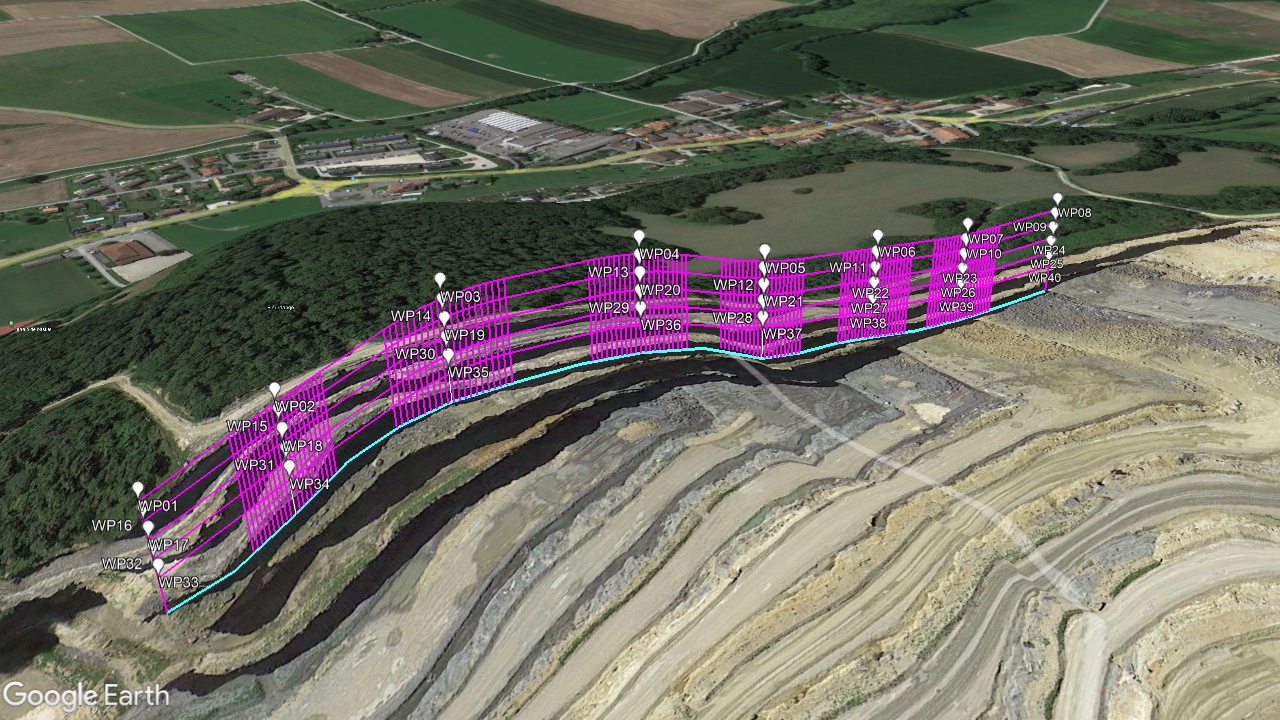
Here is the result. I know that these are manual steps, but it shows that what you desire is possible.
Thanks @wesbarris,
I spent a little time this weekend investigating the same. Next hurdle is calculating the intermediate locations between the nodes (vertices) of the polylines to capture images at.
This is starting to feel more and more like a corridor mapping mission. The same route is flown with different camera angles.
Hi @wesbarris ,
The original start and stop points are not ultra crtitcal, they are eye balled on the map.
A single pass is a good starting point. I can manipulate the string in excel to add a variety of camera angles to photograph the rock slope. First pass will ikely be nadir, then a 60 m offset away from the wall, then 3 maybe 4 angled shots for the rock slope. (I am not sure what the angles will be yet.)
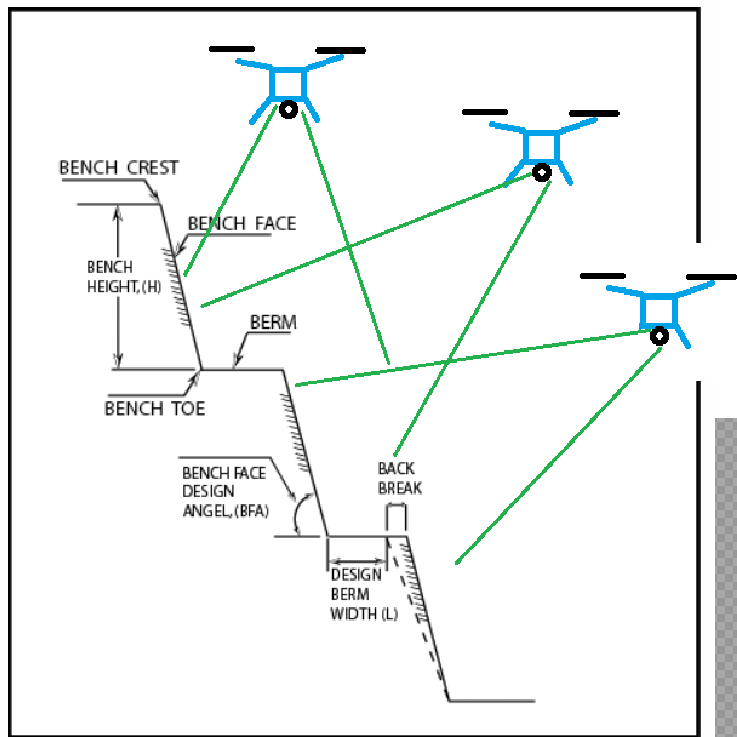
Can the aircraft be force to fly 90 degrees to the path? Here is a crude section view of what ultimately my flight plan will look like. I beleive I can manipulate the uppermost flight path with excel to get the angled shots. Flight altitude will likely be 60 m, same as for the radius
Thanks & Cheers,
Jeff