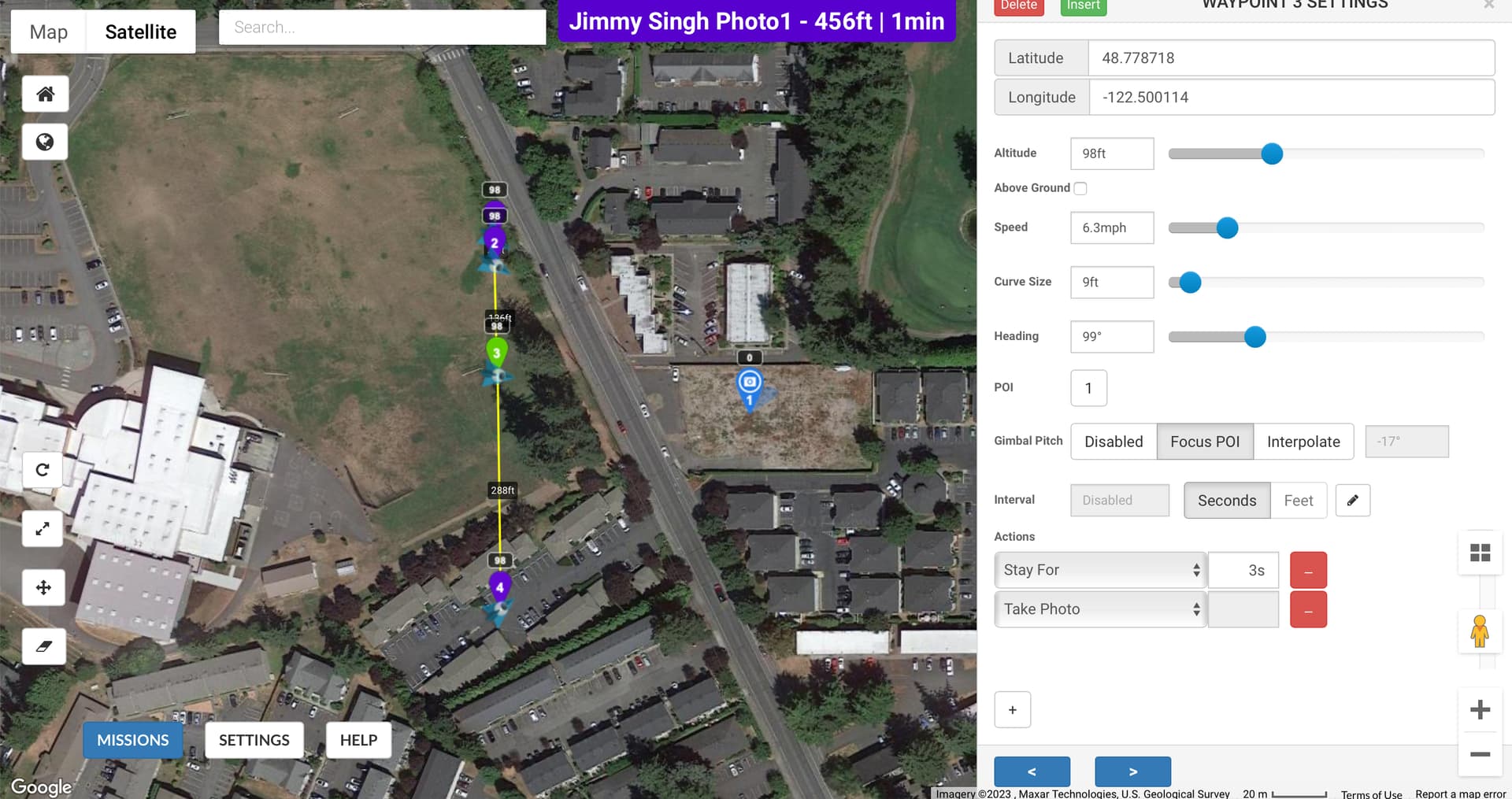
I have a mission I need to repeat weekly to take 4 photos of a construction project. I have 4 waypoints with actions set for the drone to stop for 3 seconds at each waypoint, then take a photo and move to the next waypoint. I have the same POI set for each waypoint with the gimbal set to focus on it.
First waypoint
Stops for 3 seconds, shoots a photo then moves on. However it doesn’t first point at the POI before it shoots the photo. It takes the photo from the angle it arrives at the waypoint from. So the photo is useless.
Second waypoint.
Doesn’t stop and doesn’t take a photo.
Third waypoint.
Doesn’t stop and doesn’t take a photo.
Fourth waypoint.
Stops for three seconds, then takes the photo.
Other than the position of the drone, each waypoint is identical. What am I doing wrong?
Got it. No sure why this matters, but I’ll see if it works on my next outing. Should this solve the issue of the drone not aiming at the POI at the first waypoint? Thanks.
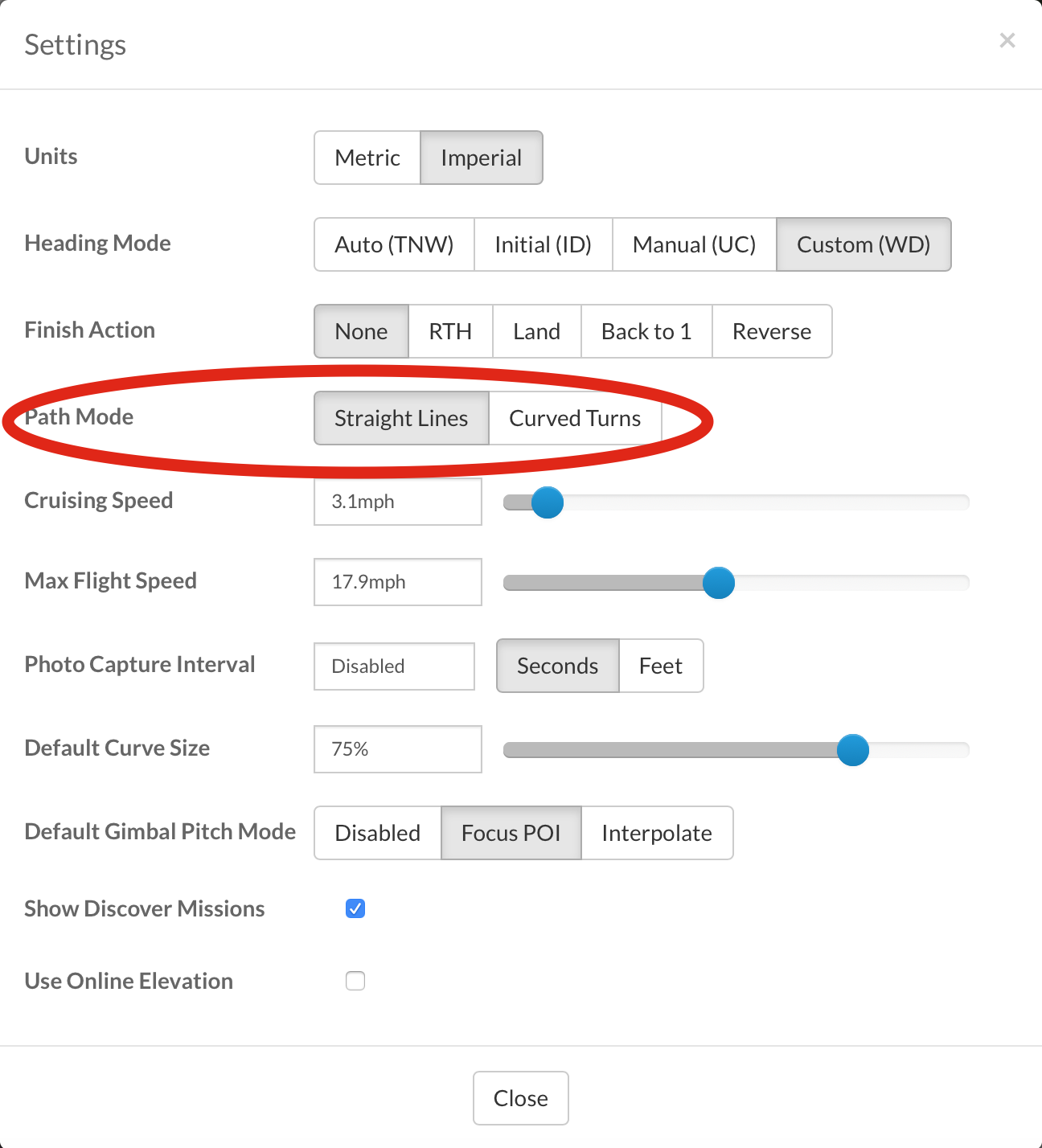
The way Litchi is designed, it will not take pictures when set to curved turns, even if you set the Default Curve Size to zero. Most times the drone will not actually reach the waypoint when set to Curved Turns so it would be impossible to activate the waypoint actions.
As far as the drone facing the POI, as long as you have each Waypoint and Mission Settings all set to Focus POI then the drone should be facing the single POI you have shown. Sometimes wind gusts or (VSC) or Virtual Stick Commands can also affect the drones ability to be very precise.
You might also want to add a “Stay For” command after the Take Photo command as it is recommended so that the drone has time to process the picture. Also check out the Search function in the upper right hand section of this page (click on the magnifying glass) for information on this and other issues with Litchi.
I hope this helps.
The first waypoint in a waypoint mission is problematic. The drone receives and executes three pieces of information at the first waypoint:
Its initial heading
Its gimbal pitch angle
Its cruising (or waypoint) speed
Since those three items are not executed until the first waypoint is reached, a photo taken immediately at that first waypoint will not be at the expected heading or gimbal pitch angle. To remedy this, you have one of two choices:
Design the mission with an extra first waypoint where no camera actions are executed. Your second waypoint and actions will executed as you would expect.
At the first waypoint, set both the “Rotate Aircraft” and “Tilt Camera” actions appropriately before using the “Take Photo” action.
I think the extra 1st waypoint makes the most sense. I actually tried that, but didn’t realize the curved mission setting was causing the photos to fail on the middle waypoints.
Concur, add a preamble waypoint, one before your first real waypoint, also does not hurt to add a final end waypoint to the mission. The initial preamble waypoint can be used to set a specific transit altitude among other things, also setup a POI that is away from your primary POI, take a photo that can then be used for sorting, searching where you mission starts/ends. Similar do same at end. For example, I have a mission that flys around a construction site with a POI in center (and POI has an assigned altitude as well). I start mission, aircraft flys to preamble or 1st waypoint with a POI away from main project site, grab a photo, then on to next series of way points, stop at a waypoint, stop recording, wait 2 sec, take photo, wait 2 sec, start recording, wait a sec, go to next waypoint and repeat until done. At the very end, the last waypoint looks towards other POI, takes photo, then RTH or cancel and do what ever. When I look at the photos/videos captured, I can tell sequence of where actual mission is as those items are “bracketed” by the photo of the outward facing POI. Reason for the extra pauses or waits have run into some issues depending on if running missions from droid or ios, so easier to just put a short pause for each waypoint.
Actions will not be performed if you are setting curved paths between waypoints, only straight lines. Are you setting a POI at each waypoint? If misdirection persists, maybe take panoramic views at the waypoints. That would be time consuming but might work,