I have a problem with the drone not taking pictures at all waypoints.
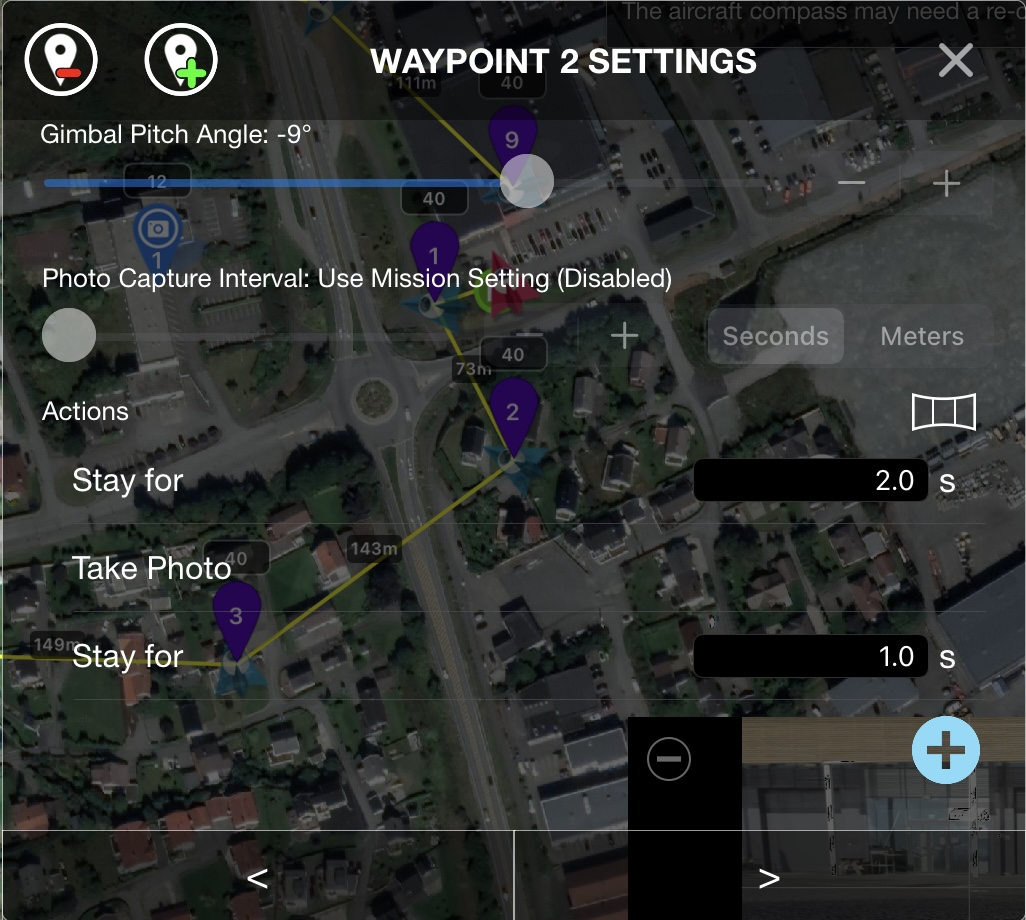
I have set each point to wait for 2sec then take a picture and then wait 1sec.
It is set to fly in straight lines and Heading is set to Custom.
It takes some random pictures. I have set up 8 points but it only takes an average of 4-5 pictures on each trip.
I have done the same thing several times before without problems with the same drone and iPad.
I have tried to set up the trip 2 times. Deleted the app and put it back in.
Still not working???
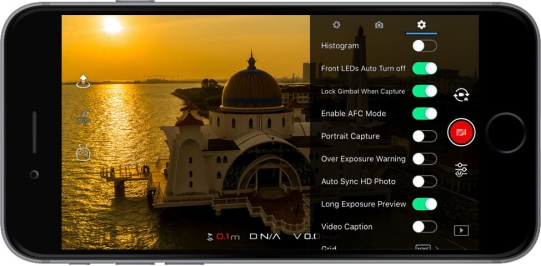
It’s a camera setting in the DJI App (DJI GO & DJI GO4)
Enabled AFC Mode: AFC stands for ‘Auto Focus Continuous’ and if this is toggled on then the camera will automatically focus when you start recording and every time the drone does not move for 1 or 2 seconds.
Dear all, I have the same question and issue.
Still testing my Air2s with FlyLitchi and I am able to fly now with the app and mission hub.
But I don’t see he is making photo’s and movies, even can’t find them on the SD card or apps .
I use a RC Pro, I love that device (ok pity it uses Android software I am more an IOS fan) and I can t find the AFC setting in the DJI Fly app. or is this not the issue or setting when its not making movies / pictures of the POI’s I set up…
Is this a settling in flying / camera mode or else ? I use the N mode on the RC Pro.
I hope you have some tips where to look.
So far FlyLitchi is a lovely app. And see a lot potential using it. Weird DJI didn’t make such app, offline Waypoint editor. The most drones apps you need to learn the device to fly the waypoints.
I even have an Autel Nano and a Skydio 2 (keyframes) .
As a newbie, I have exactly this same problem of drone not taking photos at waypoints with Litchi defaults.
I have set all the curves to zero radius. But still it does not take photos. Zero radius means straight lines, but it seems this is not enough. I will try the mission settings, thanks for that suggestion.
To any devs listening: I wish this was a bit easier with Litchi. Why is photography disabled at waypoints by default? Surely the point of setting waypoints is to do something there? Also, it is confusing having zero curve radius <> Straight lines. They are logically the same thing, but yet the software treats them differently.
As Tribar states …
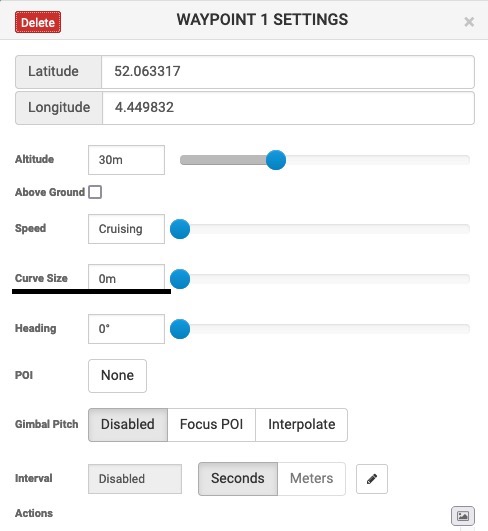
The Mission ‘Path Mode’ must be set to ‘Straight Lines’
It’s a Mission Setting, not a Waypoint setting.
When you eventually get around to read the manual, you will see that selecting straight lines
between waypoints instead of curved lines between waypoints in the
settings page allow you many options to take photos and other functions.
Setting curves to zero radius is not the correct way to go.
You need straight lines between waypoints to allow you to take photos
at each or any chosen waypoint.
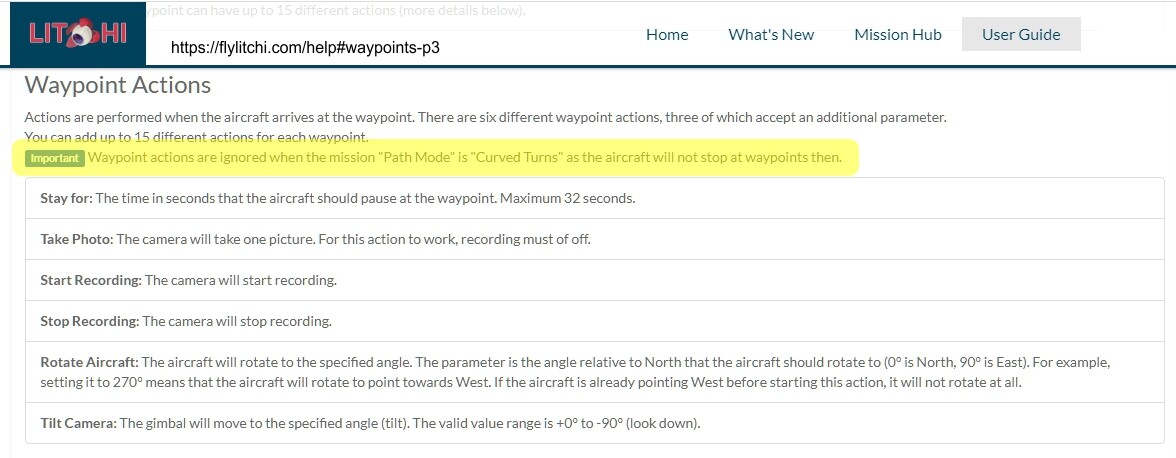
I admit that this is a source of confusion for many new users. Waypoint actions are not disabled by default. Instead, they are only executed if the “Path Mode” setting is set to “Straight Lines”.
A curve radius of zero (with Path Mode set to curved turns) may seem identical to a mission (with Path Mode set to straight lines). However, in the software, these two cases may be handled in completely different ways.
Path Mode = Straight Lines:
In this case, each segment (the line between two waypoints) has a well-defined start and end point. This makes if very easy to determine programmatically, when the drone is at a waypoint and as a result, execute actions at that waypoint.
Path Mode = Curved Turns:
In this case, the entire mission is treated as a B-Spline where the waypoints are the control points of the B-Spline. The “Curve Size” would correspond to some weighting factor at each control point. Since there are no longer individual segments and the flight path does not pass through the waypoints, executing an action at a waypoint would require continuous distance calculations as the drone flies the mission.
I do not know the inner workings of Litchi. However, I can see how these two situations would be handled completely differently in the software.
Also when Path Mode = Straight Lines:
The drone will actually STOP at each waypoint, then (after executing possible actions) first yaws to the direction of the next waypoint before it starts moving again.
The only problem with the drone stopping at all waypoints to perform the action (e.g. taking a photo) is that the mission time, which would take 18 minutes, for example, ends up taking approximately 3x the time.
In the mission shared (Mission Hub - Litchi) below, it took 23 minutes to complete 110/288 waypoints, whereas if it had flown at cruising speed, taking photos without stopping, it would have taken approximately (under ideal conditions) 18 minutes.
Set “Path Mode” to “Curved Turns”
Set “Photo Capture Interval” to 32 meters (that’s the distance between waypoints in your mission).
Because Actions at waypoints are ignored when Path Mode is set to Curved turns, you have to set “Gimbal Pitch” to “Interpolate” and “Angle” (to tilt the camera) to -65° for the first 2 waypoints or better all waypoints.
Set at every waypoint (by using Batch Edit):
Speed to “Cruising Speed”
“Gimbal Pitch” to “Interpolate”
"Angle to -65°
Cruising Speed is 50.4kph, that’s 14m/s.
The time between 2 photos 32m apart is 32/14=2.3 seconds.
That’s a very short time, internal processing time and the speed of your SD-card may NOT keep up with that resulting in skipped photos, especially when shooting in RAW (DNG).
You may have to lower your cruising speed to 38kph to achieve an interval time of 3 seconds.
(32m / 3s = 10.7m/s = 10.7 * 3.6 = 38kph)
I wanted to use Curved turns for the trip around one point and i wanted it to start recording and WP 1 and stop recording on last one. Could not do it. I had to have Straight. Will this be fixed in new beta hub?
Litchi Pilot supports actions at any waypoint when using curved turns. The previous app only supports actions on the 1st and last waypoints when using curved turns