I Have been using my drone to map agricultural fields. I know how far away my drone is from a homepoint position but I don’t know how far away my drone is from other waypoints. I would like to be able to set 3-4 waypoints in the field and see how far my drone is from each waypoint. is that something that would be possible?
if you view the mission in mission hub, the distance between each waypoint is shown
2 Likes
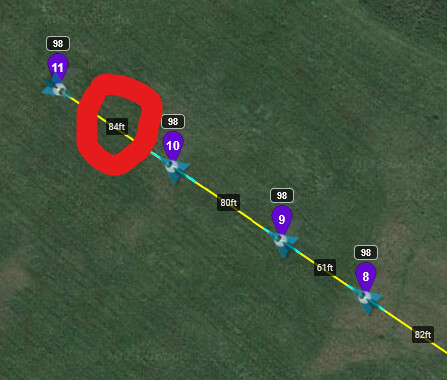
I do use that feature however what I’d like to do is place 3 or 4 waypoints and fly the drone an equal distance from all three points.
Perhaps you need to explain in more detail what you mean. Waypoints are meant to guide where your drone flies. I don’t understand your statement: “fly the drone an equal distance from all three points”.
1 Like
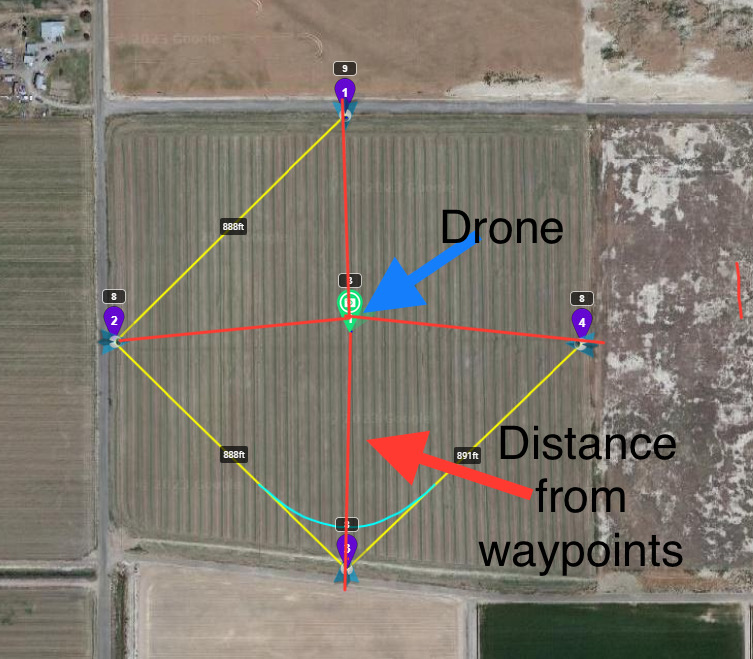
This is what i am hoping to accomplish. I would like to set 3 to 4 waypoints at the edges or tight spots in a field. I want to be able to position the drone equal distances from the waypoints like this picture depicts.
I see. Now I understand what you are trying to do. Waypoints are meant to be used to define a path for your drone to fly. They are not designed for what you are trying yo do.
One could take the GPS coordinates of your waypoints and compute the average, but that would be something to be done outside of Litchi.
If I understand @Tad_Baker, it sounds like the opposite of Wes’s Cardinal Directions Photo Mission. Where the POIs are at the corners instead Waypoints and the drone in the center instead of a POI.
I know Litchi wouldnt allow a single Waypoint mission though.
Yes. I now see that he wants the drone to be in the center of a defined set of points. I don’t know why though. What does he want the drone to do? Waypoints are meant to guide the motion of the drone through a series of positions. But that’s not what he wants.
If he wants the drone to remain at one position but take a series of photos pointing in different directions, he could use “Actions” to accomplish that. He would need to create a two-point waypoint mission. At the second waypoint he would define a series of “Rotate Camera” and “Take Photo” actions.
1 Like
All you have to do is measure the distance from edge to edge of field, halve that distance and you have the central position you want.