I have a phantom pro 3 and noticed some decrepancies between actual and indicated drone, home and controller readings. All three readings indicate a 15 yard differential from actual (based on a visual aerial landmark). What is an acceptable variance? Is there any way of implementing a x,y offset to correct values?
If you are referring to GPS accuracy, then the difference can a combination of things.
Consumer GPS enabled devices can be off by 5 to 10 meters. Buildings, etc can also affect the accuracy.
If you are comparing your controller reading to (for example) a Google Earth or other satellite image, that’s another potential level of inaccuracy.
While consumer GPS has inherent inaccuracies, 15 yards seems excessive. Can you describe exactly how you are determining the 15 yard difference?
I have a need to fly in some congested areas. I placed my drone at the base of a pole that can be seen on litchi aerial and powered it up to establish it’s home. As you can see below, home did not register at pole. I then moved drone to allow drone image to register at the base of the pole on litchi which is actually 15 steps (approx 45ft) se of pole. That 45ft difference can be critical when trying to preplan a route to fly using litchi mission in tight areas. If litchi mission planning can identify a lat and long offset that can be changed based on where on the earth you are located, I think it would solve my problem.
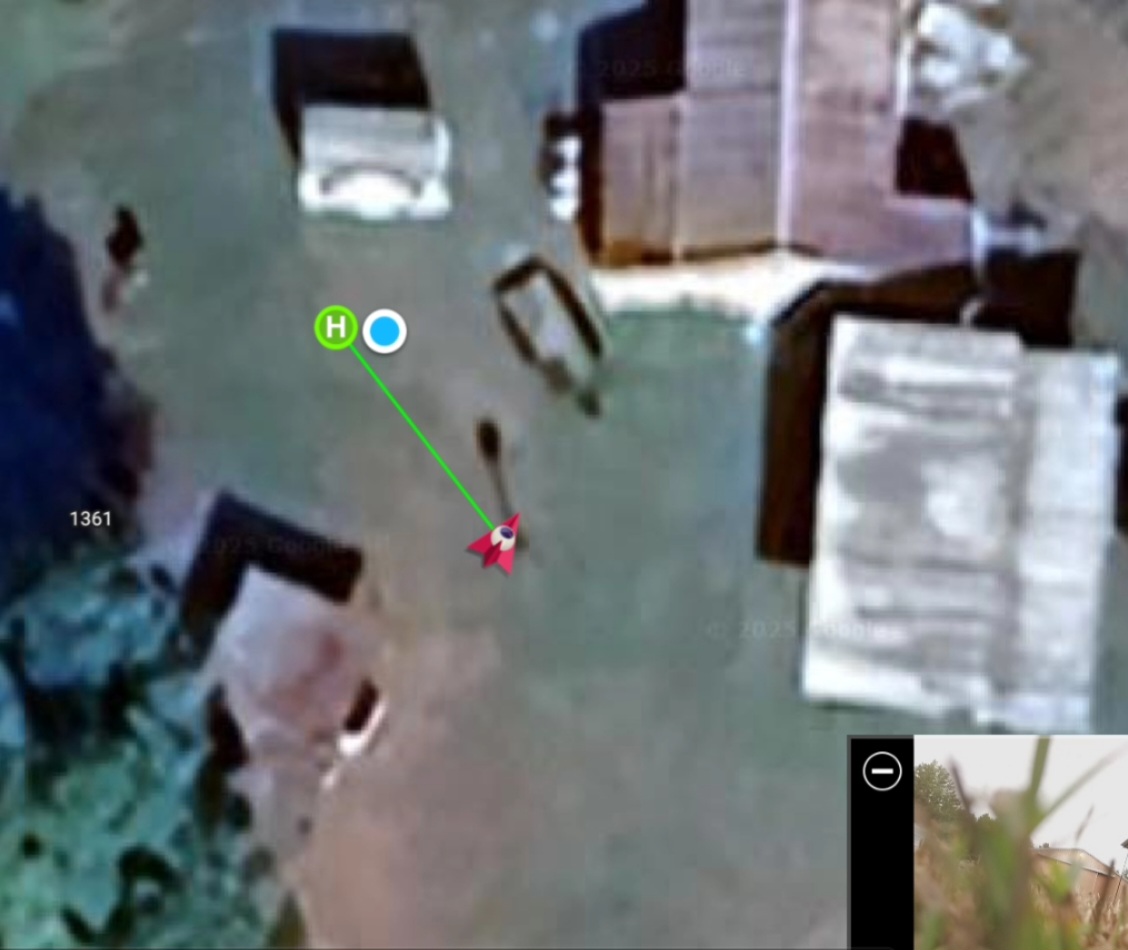
The screen capture shows that the drone was placed so that the icon is aligned to the top of the pole, not the base of the pole. Due to parallax of the satellite imagery, you should always reference the base of objects where they meet the ground instead of the tops of objects.
In any case, there are always some inaccuracies in consumer GPS positioning. However, the deviation you show appears to be on the larger end of the scale. I have found that the older DJI drones such as the Phantom 3s have poorer GPS accuracy than the newer models. One thing that does affect the accuracy is the position of the satellites at the time you executed your mission. It would be interesting to see if you experience the same offset on a different day when the satellites would have a different spread. I’m sorry that I do not have a better answer for you.
There is no such option. The only GPS option is to correct GPS data for mainland China where the Chinese government has purposefully altered GPS data over their country.
In response to your first comment, you are incorrect. Look at the object west of drone(a carport) and noticed where the shadow of carport is caused by the position of the sun. Drone is placed at the bottom of pole.
Secondly, I realize that inaccuracies very throughout the day. I would imagine that the inaccuracies would not very much within a 1-2 hr period. Plus what i am suggesting does not vary based on the age of the drone. The lat/long offset i was referring to would probably have to be updated by operator within a typical acceptable time period related to the acceptable margin of minimal GPS variance. If it is a minute to minute change, no it would not be practical. But if operator is needing to perform an accurate mission (within the duration of a battery charge), accurate offsets are needed. I am referring to intelligent mission flights. I think this would be beneficial to surveying type activities.
I do have a Phantom 3p. Don’t know if any more accurate than a 3s. And as a matter of fact, the first time I stepped off differential I detected 15 step. After 24 hrs, it took 13 steps(~ 6 ft diff). I will repeat my test and try to get more accurate. I admit I have not detected such offset options in Litchi, but this is a suggestion forum category.
Thank you for your response.