Hi, I’m new to Litchi (3 days) but have flown dozens of missions now (about 50 miles) and LOVE the waypoint functionality on my Air 2S! As you can understand, the first week’s learning curve is a steep one, but some features were quite intuitive.
I’m having difficulty getting, or understanding, a POI on my mission. I place 1 or 2 on the route, but it only seems to keep the gimble centered elevation-wise. The camera does not track the POI as I pass by. I have tried this with straight-line and curved-line missions. If it were to work properly, will a POI placed between waypoint 1 and waypoint 2, stop tracking the POI once it is behind the drone and approaching waypoint 2?
Please help me understand the ins and outs, and limitations of this feature on Litchi, using an Air 2S. I was excited to see that Litchi “fully supported” Air 2S a week ago, but I imagine bugs still need to be worked out.
Thanks in advance for help
You can find all the answers by reading/studying the Online User Guide:
Hi Jim,
You will find details in the user guide, but to briefly address your question:
During a mission using POIs, the drone will point at the POI at the waypoint for which the POI is defined.
If you have two sequential waypoints, both defined to point at the same POI, the drone will point at the POI as it travels from waypoint one to waypoint two ONLY IF both waypoints are roughly the same distance from the POI.
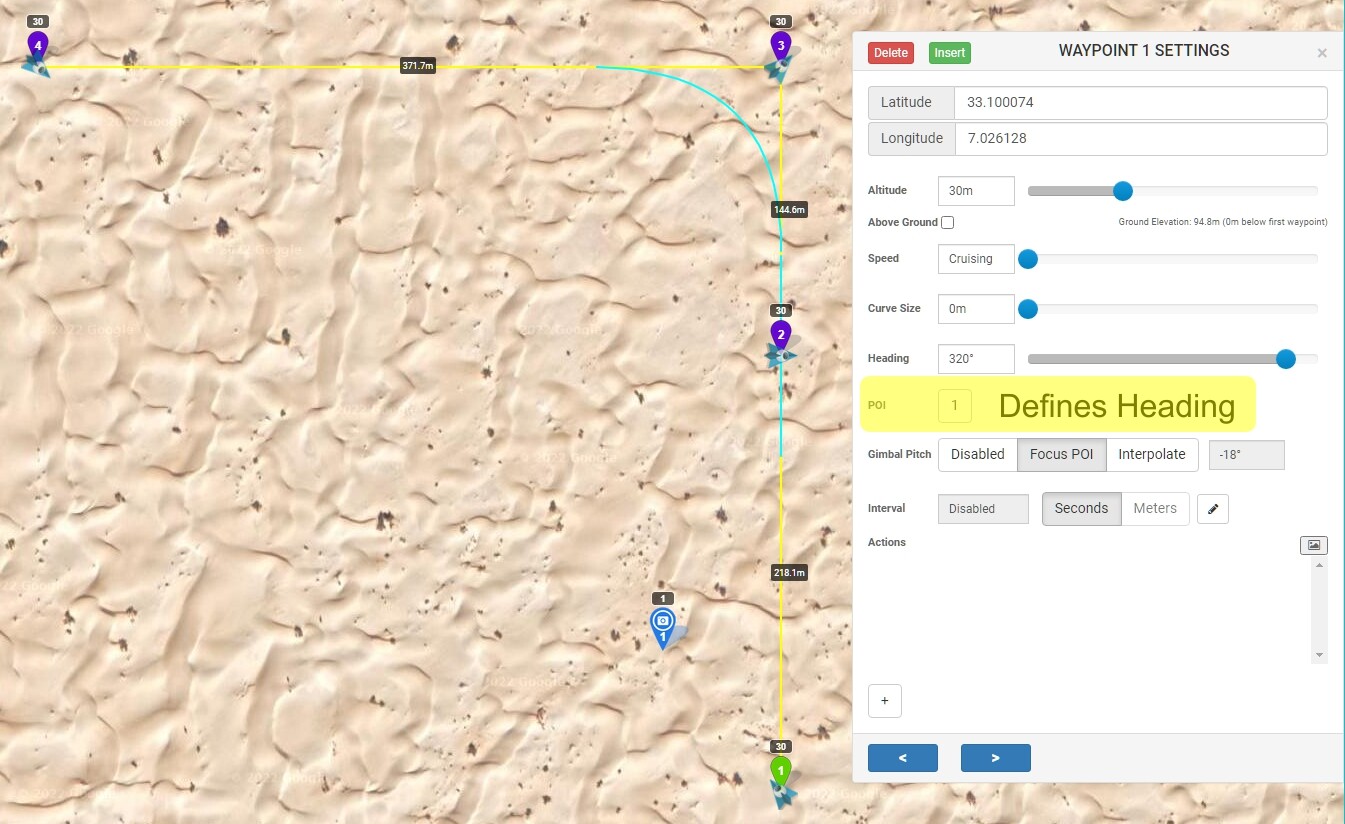
A POI/waypoint mission only defines the headings at each waypoint. The drone rotates linearly as it travels from one waypoint to the next based on the defined heading at each waypoint.
This statement is inaccurate !
The selected POI-number in Waypoint Settings defines the Heading of the drone.
(But ONLY if ‘Heading Mode’ in ‘Mission Settings’ is set to 'Custom(WD)“)
'Gimbal Pitch” set to ‘Focus POI’ defines vertical camera angle.
TriBar, tnx!! I had never changed that mode from “waypoint defined”. Can’t wait to try it. And yes, I read through most of the manual before and after starting to use Litchi. Like DHI manuals, these cover topics very vaguely at times. The “custom WD” through me off. I was looking for an abbreviation in the menus. Thanks for clarification. In many instances. These forums are more effective than the manual quite often.
Sorry TriBar but you are mistaken. My statement is indeed correct. Consider the following two POI/waypoint missions:

In both examples the heading of the drone is defined to point at the POI at both waypoints. In the first example the drone will also point at the POI as it travels from waypoint 1 to waypoint 2. However, in the second example, the drone will not point at the POI midway between the waypoints.
Because the OP is posting about POI/waypoint missions, it is a given that the waypoint mode is set to “Custom(WD)”. Yes, a gimbal pitch mode of “Focus POI” controls the pitch angle but this is not what the OP is posting about.
My point is that unless the waypoints are roughly the same distance from a POI, the drone may not “track” the POI as it travels BETWEEN the two waypoints.
YES it will, ALL the way from WP1 to WP2.
It’s the fundemental purpose for using POIs
If not, where would it point to halfway ??
False:

and

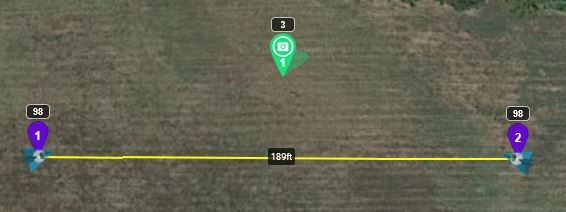
here’s a simple mission that demonstrates what @TriBar is saying
I’m surprised you don’t get this. The sections from the user guide correctly explain what how the heading changes between waypoints. The heading smoothly transitions from one heading to the next. However, if you take my second example and work out the math based on the headings at both waypoints (estimate the heading at each waypoint then compute the average) you would see that midway between the waypoints, the heading will not be pointed at the POI.
There was a discussion about this where someone went into great detail explaining the issue. I’ll see if I can find that. Perhaps that will help you to understand.
If you look at the mission i posted you’ll see that it stays focused on the POI all the way from one end to the other
That’s where you are wrong.
You assume that Litchi uses linear regression to calculate the heading angles, while in fact it uses goniometry to calcutale them.

Again, you are incorrect. Litchi is indeed using linear regression between waypoints IFF there is more than one POI in the mission. I could draw a diagram to help you understand but it has already been done. Please see the following posts:
Namirda (author of Virtual Litchi Mission) described the difference between DJI’s “Hotpoint” Mode" and normal mode:
https://mavicpilots.com/threads/virtual-litchi-mission.31109/page-51#post-1404171
Here Namirda (author of VLM) describes a change to VLM to make it behave more like Litchi when the drone is between waypoints. Please read several posts starting with Namirda’s. A later post has some excellent diagrams:
Here Facherty has a wish list for Litchi. While I don’t agree with everything he says, he does mention this POI problem between waypoints (point number 5).
I should point out that the use of geometry is only used if there is one and only one POI in your mission. If your mission has more than one POI Litchi used linear regression between waypoints.
Now that you guys have had a chance to read those posts (especially the second one) what do you think? I didn’t know about this either until Namirda confirmed it with Litchi wrote that post.
In the 7 years I use Litchi I have never encountered an obvious heading deviation while flying waypoint mission.
g’day there Jim2.
confused yet? all that math and graphs almost had my head explode.
anyhoo, I see your problem and have been there myself. earlier today, I flew my Mini2 on probably its most complex flight which turned out quite well. (will attach a screenshot at the end)
as you’ve already noticed via the comments, make use of the ‘Focus POI’ option.
I tend to put a lot of waypoints into the flight and dot POIs between them in an attempt to have the aircraft and camera rotate and pan smoothly which does seem to work (regardless of the math involved).
managed to do the same flight twice and the second time I manually used the gimbal wheel the pan down at a couple of points. (I wondered if I would be able to rotate the a/c at the same time, but thought the better of it).
practice makes perfect as they say, and I’m a work in progress.
cheers

From the Litchi Waypoint Manual - Waypoint Settings section:
" Rotation: When two consecutive waypoints have different headings, the aircraft will smoothly rotate from the first heading to the next. This setting defines the direction in which the aircraft will rotate, clockwise or anti-clockwise."
I read this as saying there is a gradual rotation deployed between waypoints and that the camera is not tracking the common POI as it flies between waypoints.
So halfway between the waypoints, the camera will be pointed at a heading that is half way between the headings of each waypoint. That may indeed not be at the POI if the POI was not located about half way between the two waypoints.
At any rate, it should be pretty easy for each of us to test out and see - but the intended functionality, according to the manual, is not to always track on the POI but rather to smoothly rotate between the two aircraft headings associated with the two waypoints.
Take care !!
I will fly this mission and see how video comes out. What will happen on its way to waypoint 2? Will the aircraft heading be roughly at a right angle to the flight path halfway between the two waypoints (1 & 2)?
What will happen as it flies between waypoint 3 and waypoint 4?
Let’s find out !!!
Given the winds here today, this will most likely be early tomorrow morning (7/12 USA Central time)

This is essentially correct. However, there are exceptions depending on how many POIs you have and if the drone has onboard waypoint functionality. If your mission contains only one POI and you are using a drone with onboard waypoints, DJI puts the flight into “Hotpoint mode” where the drone actually does track the POI. Otherwise, linear interpolation is used to control the heading between waypoints.
The OP flies an Air 2s. I fly a Mini 2.
I have been flying for less than two months - and so am a real neophyte.
Neither of these two drones have onboard waypoint functionality, correct?
As an aside, is onboard waypoint functionality what is needed to facilitate the drone completing the mission even upon signal loss - instead of following the user’s setting selection?
So for both of these drones, the aircraft and camera heading will be off of the POI for a lot of the flight, agree?
At least that is my theory formed from reading the Litchi manual. Actual experience and testing will show me what actually happens.