For recordings on the lake from a boat, it would be good to have a more advanced type of return to home. The goal would be to be able to control the location or angle of the approach and to be able to use the joystick to easily bring the drone closer to the pilot so that it can be captured by hand.
The following suggestion:
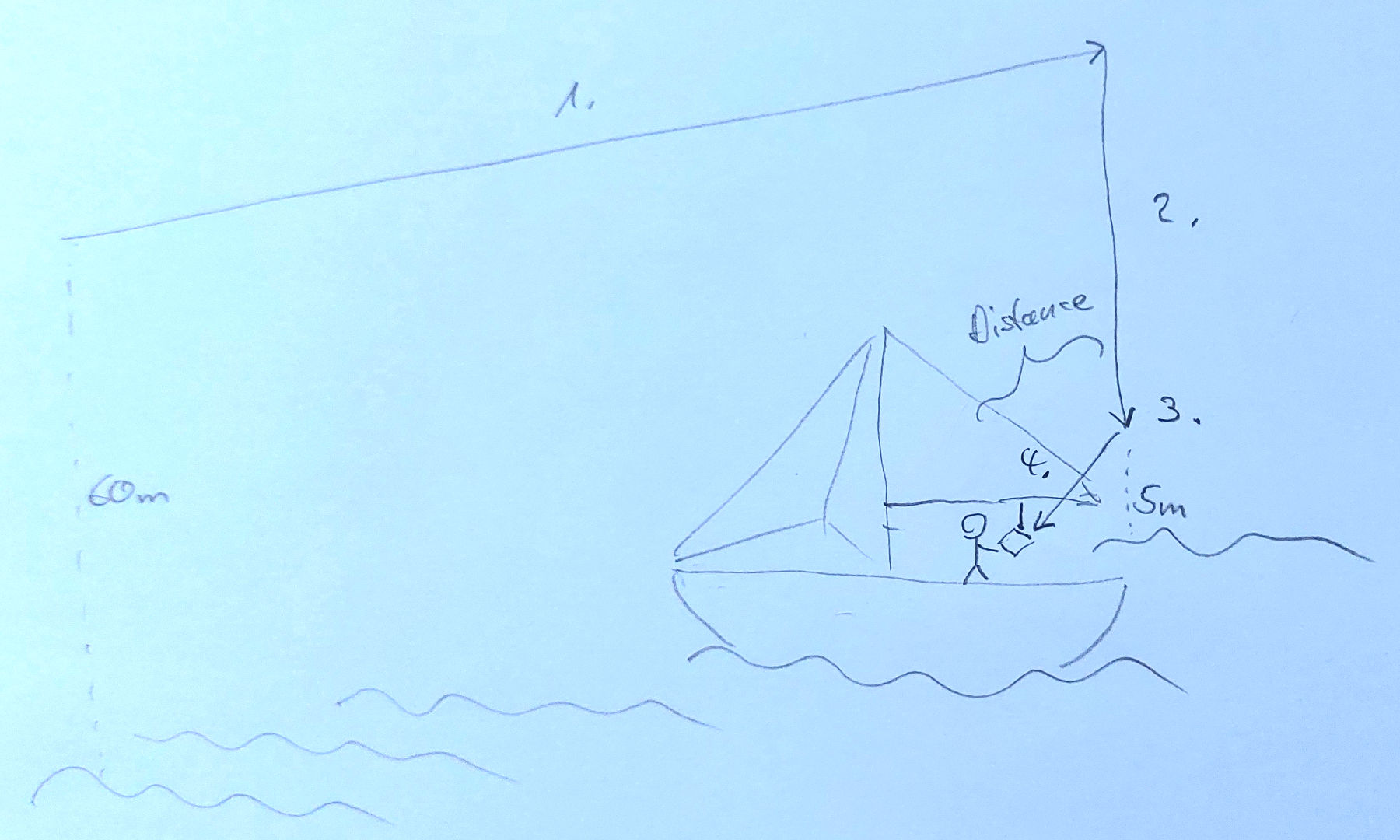
- At the standard height of return to home, the drone flies to a defined distance and in the “line of sight” of the controller.
- Descent to a second, lower height. The drone hovers there.
- By operating the joystick, the drone approaches the controller both in angle and height. When the joystick is released, the drone hovers. The height and sideways movements can also be controlled.
- The drone is captured with the left hand. The right hand is needed to control the approach (step 3). Accordingly, the propeller should be able to be switched off easily with the right hand.