I need to do some simple programming with LITCHI, is there anyone who can do it for me, paying for the trouble?
For anyone to help you, you’ll have to provide more details.
What drone?
What’s the purpose of the mission(s)?
Etc
You are right!
DJI Air 2S
The procedure I need is:
- Photo
- Jaw 30°
- Photo
- Jaw 30°
(until a full turn and 12 photos) - Up 3 meters
to repeat until I stop it
Welcome to the forum.
You will not need to pay anyone. You can do this yourself using the Mission Hub. At a waypoint you can add “Actions” as shown below:
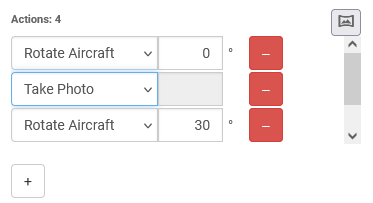
Add as many as you wish by selecting the “+” sign and selecting which action you would like to add.
When you have more questions, come back here and ask.
You can do it alone, it’s not complicated.
You can easily program missions in Python code, generated from chat GPT. I asked for detailed scenario, and now I experiment with changing parameters in CSV file and importing and exporting. Try to make a couple ow waypoints, expord and look what’s inside exported csv file. For instance, there are columns for actions: actiontype1,actionparam1,actiontype2,actionparam2
Sample code, creating circle around point of interest with waypoints.
radius = 7
alt = altitude1 # 16 m
for i in range(circle_points):
angle_deg = (360 / circle_points) * i
angle_rad = math.radians(angle_deg)
dx = radius * math.cos(angle_rad)
dy = radius * math.sin(angle_rad)
lat, lon = offset_coordinates(latitude_center, longitude_center, dx, dy)
heading = (angle_deg + 180) % 360
row = [
lat, lon, alt, heading, 0, 0,
2, gimbal_pitch, 1, 2,
latitude_center, longitude_center, alt, 1,
0, 0
]
rows.append(row)
But I still have problem with it, because drone is not heading directly to POV. Maybe need som additional actions or waypoints to stabilize drone.